Пид-регуляторы предназначены для того чтобы пропорционально, интегрально и дифференциально управлять различными процессами. Именно так расшифровывается аббревиатура этих устройств. Правильная настройка ПИД-регулятора обеспечивает быстрое достижение требуемых параметров для всей системы. Сигнал поступающий от какого-либо объекта, преобразуется определенным образом в регулирующем устройстве, а затем он возвращается и оказывает воздействие на управление этим объектом.
Зачем настраивать ПИД-регулятор
Наиболее характерным примером использования этих приборов являются термосистемы, связанные с изменениями или поддержанием на определенном уровне различной температуры. За счет тонких настроек удается существенно снизить энергетические потери при охлаждении или нагреве. Конкретные модификации ПИД-регуляторов подбираются в соответствии с индивидуальными особенностями той или иной термосистемы.
Необходимость тонких настроек рекомендуется рассматривать на примере работы обогревателя. Этот нагревательный прибор управляется ПИД-регулятором и должен поддерживать заданные температуры. Уровень температуры измеряется и контролируется термопарой. Конечная цель настроек заключается в подборе наиболее оптимального коэффициента, с помощью которого будет поддерживаться заданный температурный режим.
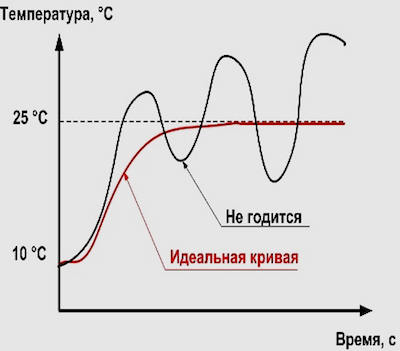
На представленных графиках видны попытки увеличения температуры с 10 до 25 градусов. В этом случае возможны различные варианты. Общим для них является подключение регулятора к обогревающей установке, в результате, его работа начнет осуществляться в режиме управляемой мощности, а микроклимат в помещении достигнет нужного уровня.
Идеальная конфигурация температурной кривой обозначена красным цветом (рис. 1). То есть, данный физический параметр плавно движется к заданной отметке за максимально короткий промежуток времени. Оптимальный временной промежуток определяется достаточно сложно, поскольку на него оказывают влияние такие факторы как мощность обогревателя, размеры помещения и т.д. Эта величина определяется экспериментальным путем.
2. 
Температурный график черного цвета указывает на неправильный выбор коэффициента при регулировании. Работа системы становится неустойчивой, регулятор функционирует неравномерно, а заданное значение не соблюдается.
В более благоприятных условиях температурные графики все так же далеки от стандартных значений (рис. 2). Черная кривая отображает сильные скачки относительно требуемого значения, а зеленая указывает на плавную, но слишком медленную регулировку.
3. 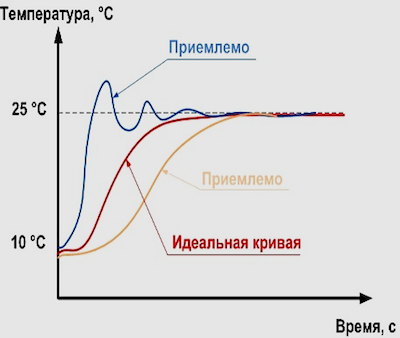
Наиболее приемлемые варианты всех трех кривых обозначены на рисунке 3. Идеальный температурный график, обозначенный красным цветом, возможен только в теории. На практике же выполняется длительный подбор коэффициентов, которые позволяют получить лишь приближенные значения, пригодные для использования. То есть, согласно представленных графиков, температура 25С достигается в среднем за 15-20 минут при максимальных скачках в 2 градуса.
Выбор необходимых коэффициентов, вычисления и настройка могут производиться с помощью различных методов.
Метод настройки по отклику
Данная методика настройки регулятора предполагает следующий порядок действий:
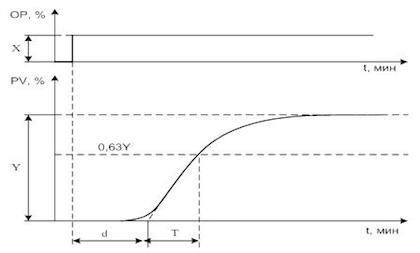
- Прежде чем настраивать регулятор, он устанавливается в ручной рабочий режим. Затем необходимо дождаться стабилизации процесса и один раз изменить выходной сигнал Х, выведенный на регулировочный клапан. За счет этого можно добиться наиболее приемлемого отклика переменной Y, отвечающей за технологический процесс. Получается настраиваемая величина, влияющая на ход общих настроек.
- После того как получен отклик, выходной параметр сигнала регулятора возвращается в исходное положение. В такое же состояние приходит и переменная технологического процесса. В норме разница между обоими показателями должна быть незначительная. Если же различие слишком существенное, попытку отклика следует повторить.
- Далее устанавливается величина коэффициентов ПИД усиления процесса по формуле Кр = Y/Х, а также временная константа Т и время запаздывания d. Для этого верхний и нижний отклики берутся по усредненным значениям.
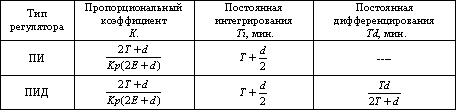
- Расчет параметров ПИД-регулятора, в том числе настроечных коэффициентов выполняется по специальной формуле: К = 2Т + d/Кр (2Е + d). По ней вычисляется пропорциональный коэффициент. В свою очередь, постоянная интегрирования определяется по формуле: Ti = Т + d/2, а постоянная дифференцирования – Td = Т/(2Т + d). Здесь Кр является коэффициентом усиления процесса, d – временем запаздывания реакции процесса (мин), Т – временной константой процесса (мин), Е – заданной временной константой замкнутого контура (мин).
- Минимально возможный промежуток времени, в течение которого процесс приводится к заданному, рассчитывается по формулам Кр = Y/Х и Е = Т + d. Чтобы сделать работу регулятора более устойчивой, временную константу Е необходимо увеличить.
Если используются каскадные регуляторы, то вначале следует настроить ведомый регулятор, а затем – ведущий. Разница между временными константами ведущего и ведомого регуляторов довольно существенная. У первого устройства она больше, чем у второго примерно в 5 раз.
Метод с максимальным коэффициентом усиления
В этом случае настройка ПИД-регулятора выполняется в определенной последовательности:
- Устройство переводится в режим ручного функционирования при достаточно стабильном процессе. В этом случае не допускаются резкие отклонения от установленного режима. Постоянная дифференциального процесса Td и пропорциональный коэффициент данного регулятора приводятся в нулевое значение. Постоянная интегрирования Ti, наоборот, выставляется на максимум.
- Исходное положение регулируемого клапана следует запомнить, оно может понадобиться во время настроек. После этого регулятор переключается в автоматический режим.
- Коэффициент пропорциональной зависимости постепенно увеличивается до начала появления колебаний, которые должны иметь постоянную амплитуду. В случае возрастания амплитуды, нужно уменьшить значение пропорционального коэффициента, а при сильных перепадах регулятор переводится в ручной режим.
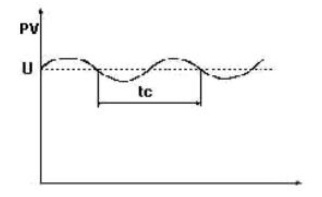
- После этого выставляется зафиксированное исходное положение клапана, пропорциональный коэффициент уменьшается, а процесс настройки повторяется. В случае появления равномерных колебаний следует замерить их период (tc). Для этого нужно чтобы был отработан один полный цикл. Пропорциональный коэффициент, полученный в результате измерений, будет иметь максимальное значение для этой регулировочной системы (Кmax).
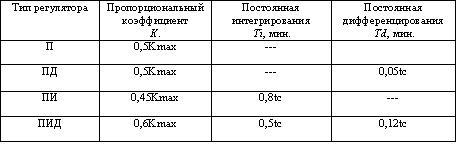
- Коэффициент настройки ПИД-регулятора можно рассчитать на основании Кmax и tc по формулам: пропорциональный коэффициент К = 0,6 Кmax, постоянная интегрирования Ti = 0,5 tc, постоянная дифференцирования Td = 0,12 tc.
Общие рекомендации для настроек ПИД-регуляторов
- Регулируемый клапан должен находиться примерно в среднем положении, иначе регулятор не будет работать.
- Все настройки проводятся в зоне шкалы, которая будет использоваться для работы.
- По завершении настроек проверяется устойчивость работы регулятора в разных режимах. При наличии скачков коэффициент усиления следует уменьшить.