Схема управления нереверсивным двигателем – «прямой пуск»
Данная схема состоит из следующих устройств:
- автоматический трехполюсный выключатель – QF1 (защита цепей питания двигателя ~380В);
- линейный контактор – КМ1;
- тепловое реле – КК1 (защита от перегрузки двигателя);
- предохранитель – FU1 (защита цепей управления ~220В);
- кнопки «СТОП» и «ПУСК» с самовозвратом – SB1 и SB2;
- сигнальные лампы — HL1 и HL2.
Принцип работы
При нажатии кнопки SB2 «ПУСК» подается напряжение на катушку контактора КМ1. Контактор срабатывает и своими силовыми контактами подключает к сети 380В асинхронный двигатель. При этом своими контактами 14-13 шунтирует кнопку SB2, делается это для того, чтобы катушка контактора была постоянно под напряжением и он не отключался при отпускании кнопки SB2.
Отключение двигателя происходит нажатием кнопки SB1 «СТОП». Для защиты от перегрузки двигателя применяется тепловое реле КК1, в случае перегрузки двигателя, контакты 96-95 реле КК1 размыкаются снимая напряжение с катушки контактора КМ1.
Схема реверсивного управления двигателем
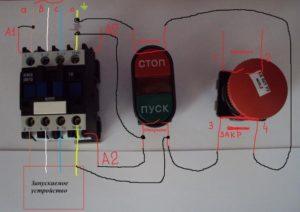
Отличие данной схемы от предыдущей схемы в том, что изменяя порядок чередования фаз на статоре двигателя, мы изменяем направление вращения ротора двигателя «Вправо» — «Влево». При нажатии кнопки SB2 «Открыть» (в данном примере схема используется для управления реверсивной задвижкой) срабатывает контактор КМ1 и ротор двигателя вращается в одну сторону при этом задвижка открывается. В этом случае порядок чередования – А, В, С.
Что бы ротор двигателя вращался в другую сторону, нужно сначала нажать кнопку SB1 «СТОП» и лишь потом нажать кнопку SB3 «Закрыть», в результате сработает контактор КМ2 и ротор двигателя вращается в обратную сторону при этом задвижка закрывается. Порядок чередования фаз – С, В, А.
Во избежание короткого замыкания при одновременном нажатии кнопок SB2 и SB3 используются нормально-закрытые контакты 22-21 контакторов КМ1 и КМ2 и таким образом исключается возможность включения одного контактора пока не обесточится другой.
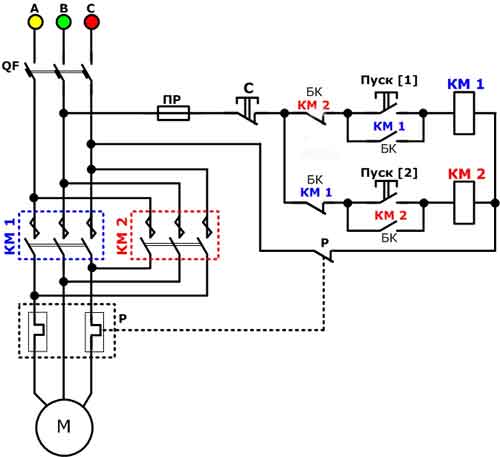
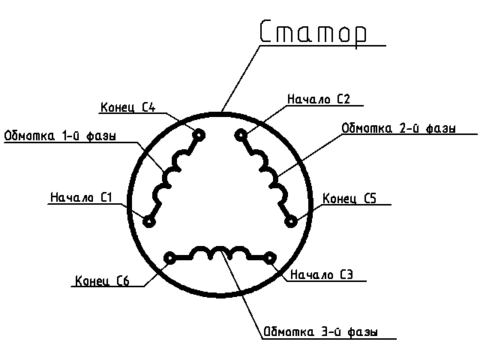
Схема управления двигателем «звезда-треугольник»
Данная схема применяется когда нужно уменьшить пусковой ток двигателя, в основном она используется для двигателей большой мощности.
В момент пуска, обмотки статора двигателя соединены в «звезду», после того как двигатель разогнался, происходит переключение обмоток статора со «звезды» на «треугольник».
Подробно об изменении мощности при схеме соединении двигателя звезда-треугольник рассмотрено в статье: «Расчет мощности двигателя при схеме соединения звезда-треугольник».
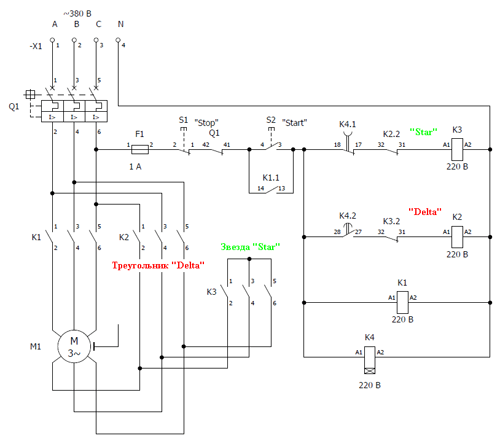
Принцип работы
При нажатии кнопки SB2 «ПУСК» подается напряжение на катушку реле времени КТ1, контактора КМ1 и промежуточного реле KL1. Реле KL1 добавлено в схему в связи с тем, что у реле времени есть только одна группа блок-контактов, если же у Вашего реле времени есть дополнительная группа блок-контактов, реле KL1 – не используется. Не много забегая вперед, в архиве вы сможете найти схему управления двигателем «звезда-треугольник» без промежуточного реле KL1.
После того как сработало реле KL1 мгновенно замыкаются его контакты 11-14 и через нормально закрытые контакты 22-21 контактора КМ2 срабатывает контактор КМ3. При этом контакты 21-22 реле KL1 размыкаются, тем самым выполняется блокировка от одновременного включения контакторов КМ3 и КМ2.
Когда контактор КМ3 сработал, он своими силовыми контактами соединяет обмотку статора двигателя «звездой».
После того как двигатель разогнался при пониженном напряжении, контакты реле времени КТ1 11-12 разомкнутся, тем самым сняв напряжение с катушки реле KL1, в это время контакты реле KL1 11-14 размыкают цепь включения контактора КМ3, а в цепи включения контактора КМ2 замыкаются, и если контакты 21-22 контактора КМ3 замкнуты, то включается контактор КМ2.
После этого контактор КМ2 своими силовыми контактами соединяет обмотку статора двигателя «треугольником».
На этом процесс подключения двигателя к сети ~380 В – заканчивается.
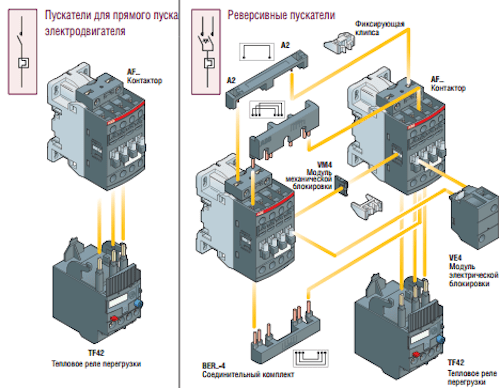
Условные обозначения на схемах
Магнитный пускатель (далее — пускатель) — коммутационный аппарат предназначенный для пуска и остановки двигателя. Управление пускателем осуществляется через электрическую катушку, которая выступает в качестве электромагнита, при подаче на катушку напряжения она воздействует электромагнитным полем на подвижные контакты пускателя которые замыкаются и включают электрическую цепь, и наоборот, при снятии напряжения с катушки пускателя — электромагнитное поле пропадает и контакты пускателя под действием пружины возвращаются в исходное положение размыкая цепь.
У магнитного пускателя есть силовые контакты предназначенные для коммутации цепей под нагрузкой и блок-контакты которые используются в цепях управления.
Контакты делятся на нормально-разомкнутые — контакты которые в своем нормальном положении, т.е. до подачи напряжения на катушку магнитного пускателя или до механического воздействия на них, находятся в разомкнутом состоянии и нормально-замкнутые — которые в своем нормальном положении находятся в замкнутом состоянии.
В новых магнитных пускателях имеется три силовых контакта и один нормально-разомкнутый блок-контакт. При необходимости наличия большего количества блок-контактов (например при сборке реверсивной схемы пуска электродвигателя ), на магнитный пускатель сверху дополнительно устанавливается приставка с дополнительными блок-контактами (блок контактов) которая, как правило, имеет четыре дополнительных блок-контакта (к примеру два нармально-замкнутых и два нормально-разомкнутых).
Кнопки для управления электродвигателем входят в состав кнопочных постов, кнопочные посты могут быть однокнопочные, двухкнопочные, трехкнопочные и т.д.
Каждая кнопка кнопочного поста имеет по два контакта — один из них нормально-разомкнутый, а второй нормально-замкнутый, т.е. каждая из кнопок может использоваться как в качестве кнопки «Пуск» так и в качестве кнопки «Стоп».
Схема прямого включения электродвигателя
Данная схема является самой простой схемой подключения электродвигателя, в ней отсутствует цепь управления, а включение и отключение электродвигателя осуществляется автоматическим выключателем.
Главными достоинствами данной схемы является дешевизна и простота сборки, к недостаткам же данной схемы можно отнести то, что автоматические выключатели не предназначены для частого коммутирования цепей это, в сочетании с пусковыми токами, приводит к значительному сокращению срока службы автомата, кроме того в данной схеме отсутствует возможность устройства дополнительной защиты электродвигателя.
Схема подключения электродвигателя через магнитный пускатель
Эту схему так же часто называют схемой простого пуска электродвигателя, в ней, в отличии от предыдущей, кроме силовой цепи появляется так же цепь управления.
При нажатии кнопки SB-2 (кнопка «ПУСК») подается напряжение на катушку магнитного пускателя KM-1, при этом пускатель замыкает свои силовые контакты KM-1 запуская электродвигатель, а так же замыкает свой блок-контакт KM-1.1, при отпускании кнопки SB-2 ее контакт снова размыкается, однако катушка магнитного пускателя при этом не обесточивается, т.к. ее питание теперь будет осуществляться через блок-контак KM-1.1 (т.е. блок-контак KM-1.1 шунтирует кнопку SB-2). Нажатие на кнопку SB-1 (кнопка «СТОП») приводит к разрыву цепи управления, обесточиванию катушки магнитного пускателя, что приводит к размыканию контактов магнитного пускателя и как следствие, к остановке электродвигателя.

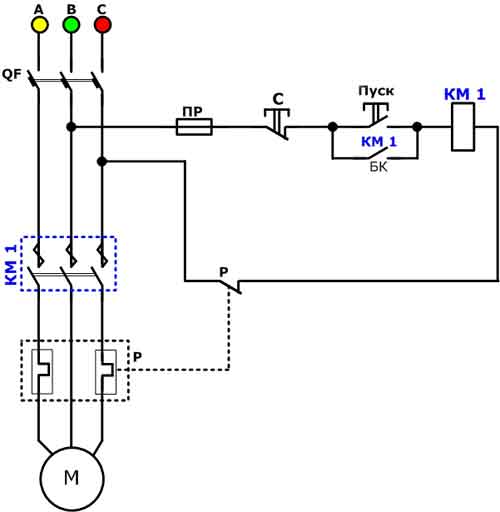
Нереверсивная схема управления асинхронного двигателя
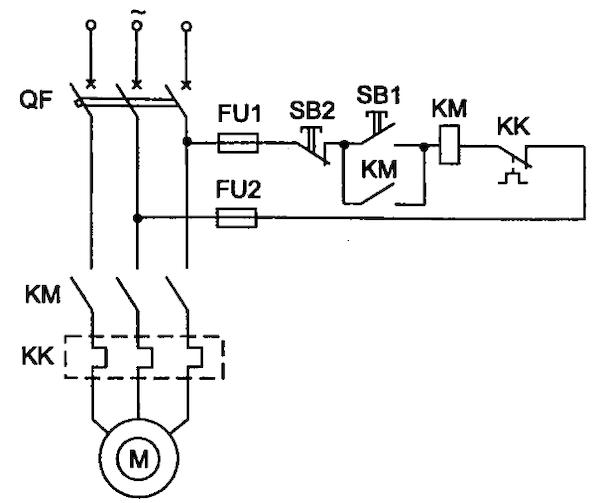
Рисунок 1 — Простейшая схема асинхронного двигателя
Для подачи напряжения на управляющую и силовую цепь используется автоматический выключатель QF. Пуск асинхронного двигателя осуществляется кнопкой SB1 «Пуск”, которая замыкает свои контакты в цепи катушки магнитного пускателя КМ. Который срабатывая замыкает основные контакты силовой цепи статора. Вследствие чего электродвигатель М подсоединяется к питанию. В то же время в управляющей сети происходит замыкание блокирующего контакта КМ который шунтирует кнопку SB1.
Чтобы отключить асинхронный двигатель с кз ротором, необходимо нажать клавишу SB2 «Стоп». При этом питающая сеть контактора КМ размыкается и подача напряжения на статор прекращается. После этого нужно выключают автомат QF.
Схема управления АД с кз предусматривает несколько защит:
- от КЗ — посредством автоматического выключателя QF и плавкими предохранителями FU;
- от перегрузок — посредством теплореле КК (при перегреве данные устройства отсоединяют контактор КМ, прекращая работу движка);
- нулевая защита — посредством магнитного пускателя КМ (при низком напряжении или его полном отсутствии контактор КМ оказывается незапитанным, размыкается и электродвигатель выключается).
Для подключения электродвигателя после срабатывания защитного механизма требуется снова надавить клавишу SB1.
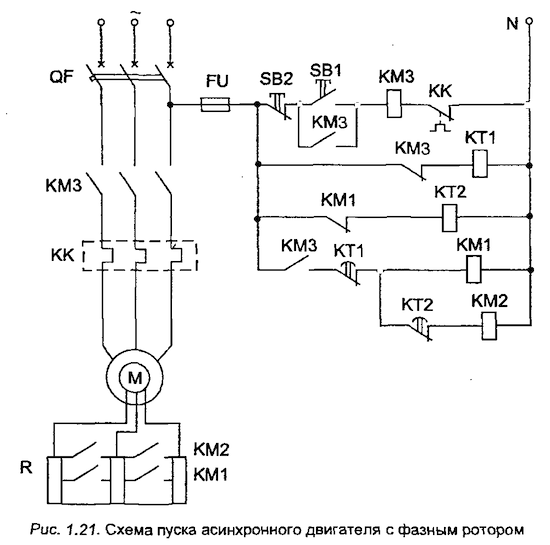
Реостатный пуск асинхронного двигателя с кз ротором.
Если невозможно запустить АД с кз ротором в стандартном режиме, используют запуск при сниженном напряжении. С этой целью в цепь статора добавляют сопротивление, реостат или используют автотрансформатор. Автоматический выключатель QF срабатывает и на управляющую и силовую цепь поступает напряжение. После нажатия кнопки SB1 пускатель КМ1 приходит в действие, подавая электроток в цепь статора с включенным сопротивлением. В то же время питание поступает и на реле времени КТ.
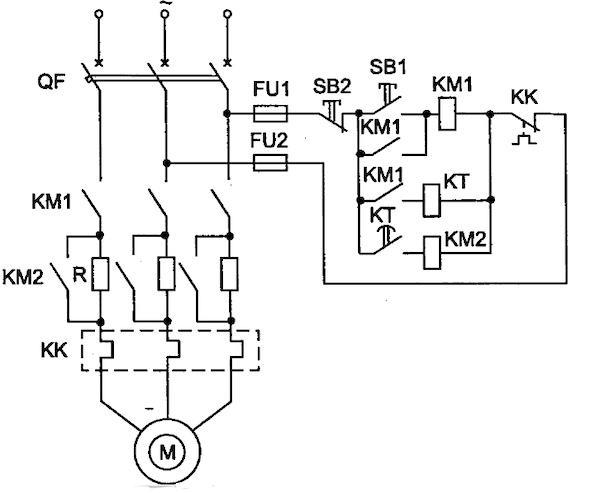
Рисунок 2 — Схема асинхронного двигателя с симметричными сопротивлениями (реостатный пуск)
Через определенный временной интервал, задаваемый реле КТ, происходит замыкание контакта КТ. В итоге пускатель КМ2 шунтирует (закорачивает) сопротивление статора. Процедура запуска электродвигателя завершается. Для его выключения необходимо нажать клавишу SB2 и выключить автомат QF.
Реверсивный пуск асинхронного двигателя
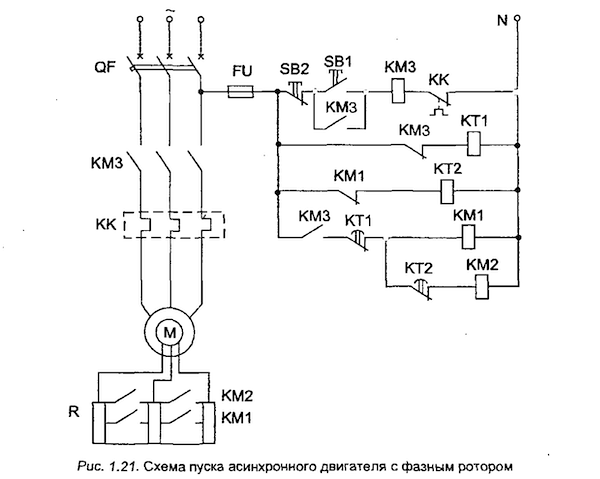
Рисунок 3. Схема реверсивный пуск асинхронного двигателя с кз ротором.
Данная схема дает возможность производить запуск электродвигателя и изменять направленность его вращения. Для запуска необходимо включить автомат QF и нажать SB1 «Пуск», в результате чего ток поступает на магнитный пускатель КМ1, который запитывает статор. АД реверсируется последовательным нажатием кнопок «Стоп» SB3 (КМ1 выключается и двигатель останавливается) и «Реверс» SB2 (срабатывает КМ2 и асинхронный двигатель запускается в реверсивном направлении).
В данной схеме нажатием кнопки реверса меняется чередование фаз питающего напряжения на статоре двигателя, что будет вызывать смену направленности его вращения (реверсом). При помощи нормально замкнутых контактов КМ1 и КМ2 выполнена защита от ошибочного включения сразу двух магнитных пускателей КМ1 и КМ2. Также действуют защиты, аналогичные описанным ранее. Отключить электродвигатель можно кнопкой SB3 и автоматом QF.
Что такое асинхронный двигатель?
Прежде чем переходить к модели, алгоритмам и системам управления электроприводом, нужно точно знать, что он собой представляет. Это позволяет выявить в его цепи такие моменты, которые можно будет использовать для организации плавного изменения ключевых характеристик (частота/скорость вращения, напряжение). Соответственно, можно определить параметры контроллера, разработать технологические карты для его размещения в шкафу и обслуживания.
Работа любого асинхронного двигателя базируется на возбуждении на контактных обмотках магнитного поля при подаче электричества от шкафа управления. Оно возникает на статоре – неподвижной части двигателя, которая состоит из кольцевого сердечника (магнитопровода), собранного из отдельных металлических пластин. Каждая из них имеет концентрические пазы на внутренней стороне кольца, которые при совмещении образуют продольные пазы. Они служат для намотки проволоки, составляющей основу статорной обмотки.
Также асинхронный двигатель имеет подвижную часть – ротор, совмещенный с приводным валом. Он также имеет пластинчатый сердечник с пазами, но уже на внешней стороне. Вместо проволоки используются медные прутки, которые по краям замыкаются пластинами (такой вариант двигателя называется с короткозамкнутым ротором).
За счет того, что частоты вращения магнитных полей статора и ротора отличаются, в обмотках последнего за счет индукции наводится электрический ток. Он, в свою очередь, побуждает электромагнитную силу, приводящую ротор в движение (вращение). Разница частот обычно называется скольжением. Его величина составляет порядка 2…10%.
Как можно управлять скоростью вращения двигателя
Очевидно, что двигатель в обычном режиме работы от сети (электрического шкафа) имеет стандартную скорость/частоту вращения. Это ограничивает прямое его использование, вынуждая применять различные редукторные механизмы для понижения частоты до требуемой. Но даже тогда нет возможности динамично менять обороты, а вместе с ними, мощность, подачу, поскольку все равно остаются фиксированными частоты на выходе из двигателя и редуктора. Для расширения существующих рамок используют разные способы управления (частотные, импульсные, фазные и т. д), которые можно разделить на две большие группы:
- Скалярное. Как правило, используется на приводных двигателях компрессорных, вентиляторных, насосных и прочих механизмов, где требуется контроль скорости вращения или любого другого параметра, связанного с датчиками,
- Векторное. Это усовершенствованная концепция, которая предполагает раздельный, независимый контроль, изменение момента и магнитного потока. Токосцепление ротора поддерживается на постоянном уровне, что позволяет сохранить максимальный показатель момента.
Управление асинхронным двигателем
Отличие скалярного от векторного управления как раз заключается в возможности осуществления контроля возбуждения (потока). Фактически, он представляется как двигатель постоянного тока, имеющий независимые друг от друга обмотки. Такой подход позволяет создать подобную математическую модель системы работы контроллера.
Формы и схема векторного управления
Все существующие на сегодня системы векторного управления работой двигателей можно разделить на две группы:
- Датчиковые. Блок управления работой двигателя имеет с ним обратную связь по скорости, с помощью расположения на валу соответствующих датчиков,
- Бездатчиковые. Это системы, которые работают без датчиков скорости на основном валу.
Датчиковые системы являются более сложными, так как точность контроля составляет 1:10000. Бездатчиковые системы работают на уровне не более 1:100. Все частотники с учетом уровня создаваемых помех устанавливаются в центральных или отдельных шкафах. Если представить все выше сказанное как наглядную схему, то получится нечто следующее.
Здесь можно видеть такие ключевые компоненты системы управления, как:
- АД – собственно, асинхронный двигатель (объект контроля),
- БРП – логический блок регуляторов для переменных уравнения,
- БВП – логический блок, отвечающий за вычисления по переменным,
- БЗП – блок, задающий значения переменных,
- ДС – датчик скорости на валу двигателя,
- АИН ШИМ – блок амплитудно-импульсной/широтно-импульсной модуляции.
То, что на схеме отображено в виде блоков, на практике является всего лишь параметрическими элементами цепи управления, которая реализуется на микроконтроллере. Соответственно, сам контроллер и сопутствующие исполнительные механизмы монтируются в электрический шкаф. Для правильного монтажа разрабатывается технологическая карта.
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.
Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
Функциональная схема частотно-регулируемого привода. В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Скалярное управление асинхронным двигателем с датчиком скорости
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом. Полеориентированное управления асинхронным электродвигателем по датчику положения ротора
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Полеориентированное управления асинхронным электродвигателем без датчика положения ротора
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.